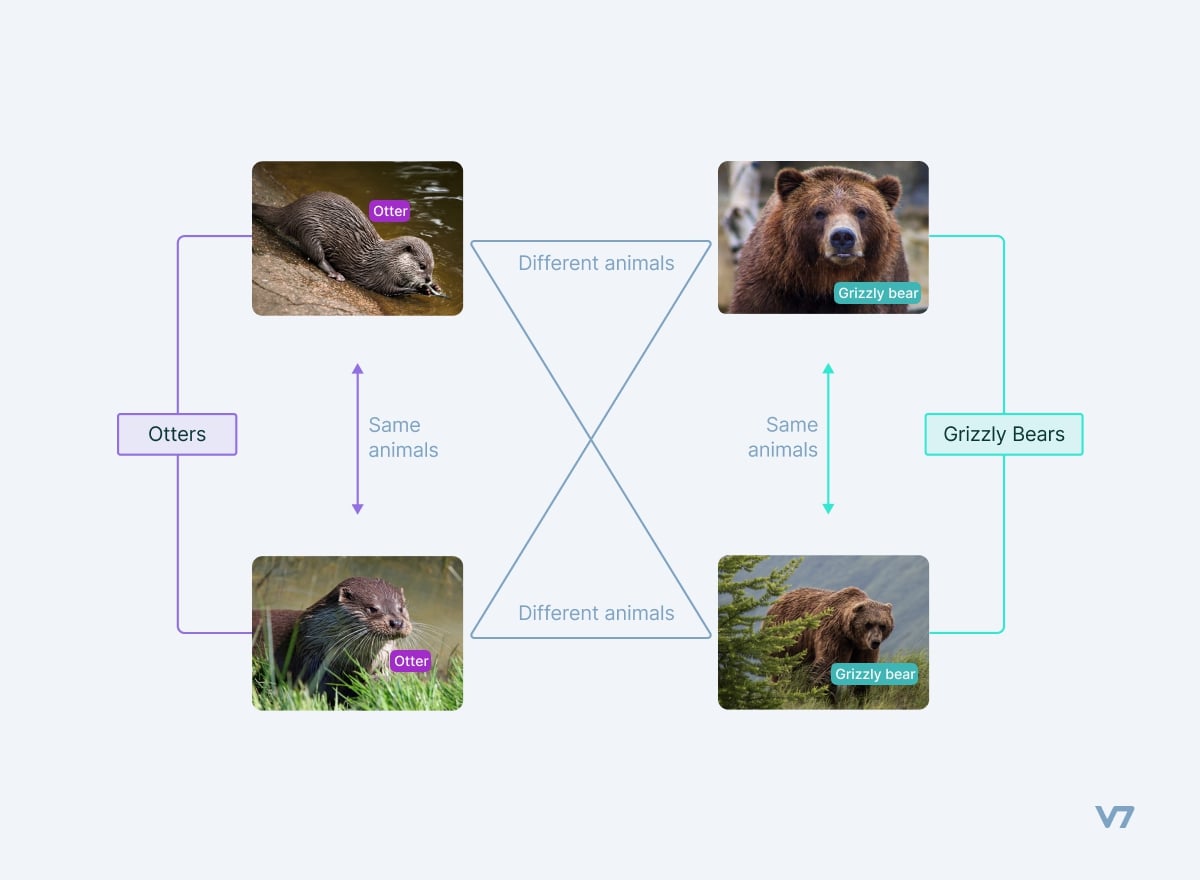
Introduction 对比学习是一种为机器学习模型描述相似和不同事物的任务的方法...
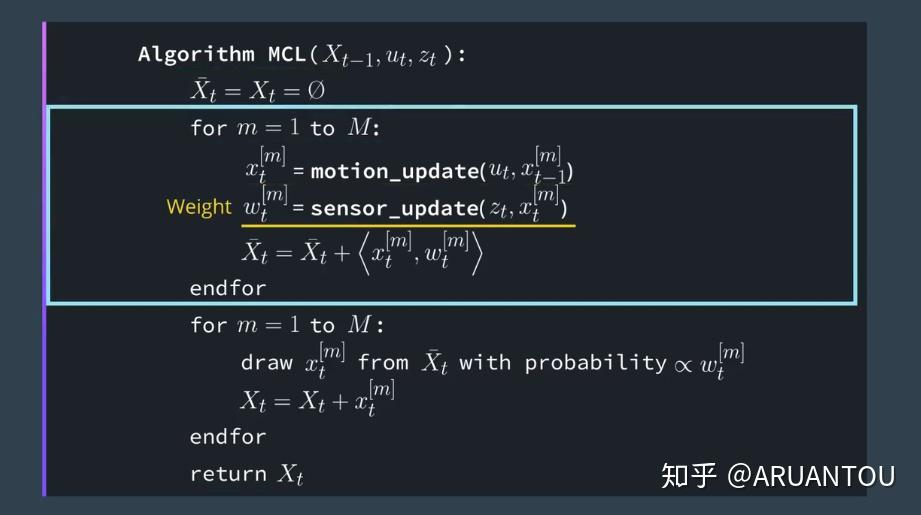
Introduction 蒙特卡洛定位算法(Monte Carlo Localization, MCL)的公式推导涉及粒子滤波(Particle Filter)的数学基础。粒子滤波是一种基...
Angent的实现 Overview 之前学习了状态迁移函数,并能绘制机器人。 这节的目标是实现机器人的引擎,让机器人能动起来。 <...
Graphrag Graphrag是什么? GraphRAG 是一种结构化的、分层的检索增强生成(RAG)方法,而不是使用纯文本片段的语义搜索方法。Grap...

Introduction ...

Objective 绘制世界坐标系 如何描述机器人的位姿 如何绘制世界坐标系 如何绘制机器人位姿 可参考:3.2...
机器人开发环境介绍 In this section, we will tintroduce: the usage case of robots the devel...
...
Objective 用动画来绘制Robot仿真环境 ...
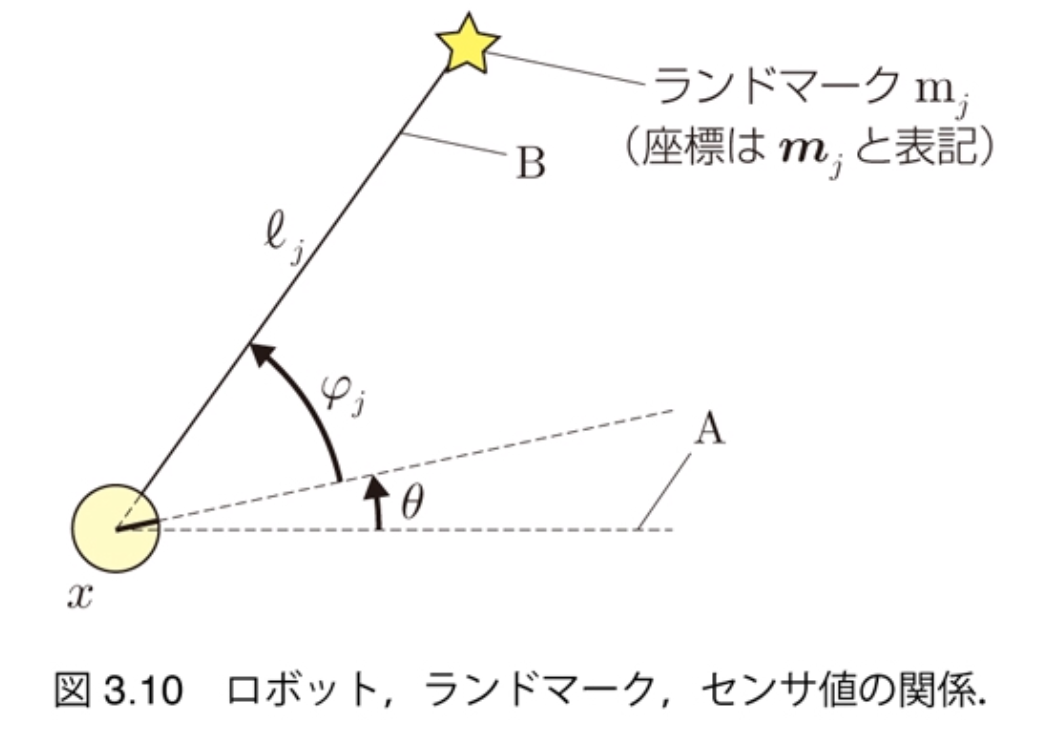
绘制地图点 Overview 概率机器人详解 (Python) 3.3.1 点ランドマークの設置 ...