Slam
Agent引擎的实现
Angent的实现 Overview 之前学习了状态迁移函数,并能绘制机器人。 这节的目标是实现机器人的引擎,让机器人能动起来。 <...

Lidar Cam Calibration
Introduction ...

机器人位姿描述
Objective 绘制世界坐标系 如何描述机器人的位姿 如何绘制世界坐标系 如何绘制机器人位姿 可参考:3.2...
机器人开发环境介绍
机器人开发环境介绍 In this section, we will tintroduce: the usage case of robots the devel...
机器人概率基础
...
用动画来绘制Robot仿真环境
Objective 用动画来绘制Robot仿真环境 ...
绘制Landmark
绘制地图点 Overview 概率机器人详解 (Python) 3.3.1 点ランドマークの設置 ...
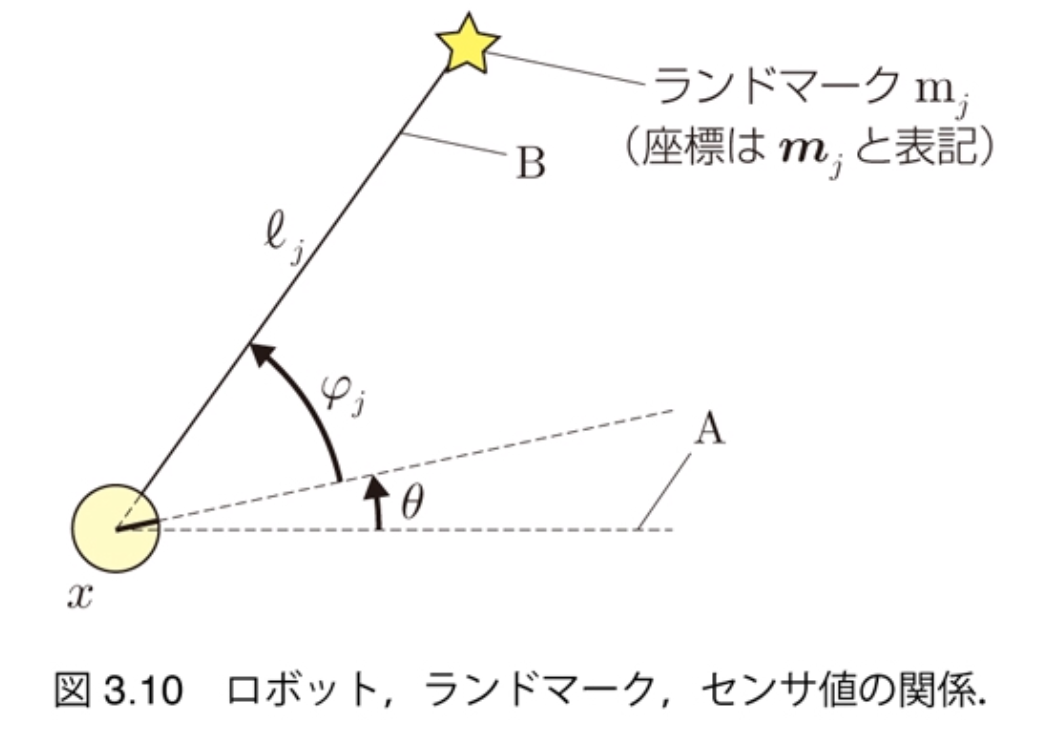
观测方程
観測方程式 ...
运动方程
内容 运动方程, 控制命令, 让机器人动起来。 ...
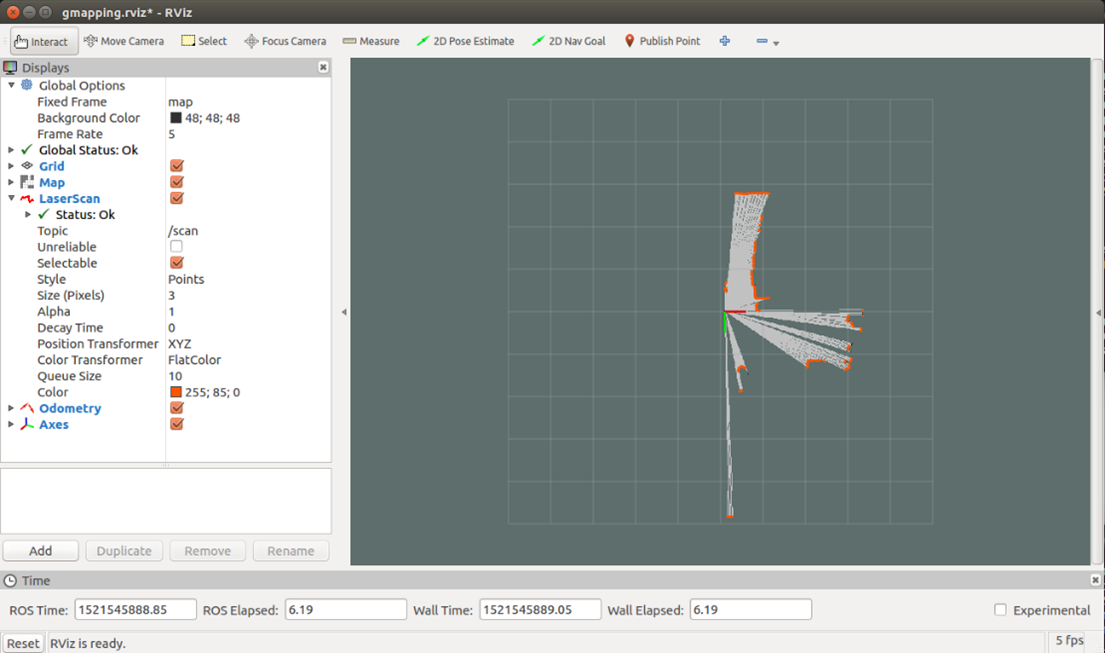
GMAPPING
Introduction Gmapping是一个基于2D激光雷达使用**...