GMAPPING
Introduction
Gmapping是一个基于2D激光雷达使用**RBPF(Rao-Blackwellized Particle Filters)算法完成二维栅格地图**构建的SLAM算法。
优点:gmapping可以实时构建室内环境地图,在小场景中计算量少,且地图精度较高,对激光雷达扫描频率要求较低。
缺点:随着环境的增大,构建地图所需的内存和计算量就会变得巨大,所以gmapping不适合大场景构图。一个直观的感受是,对于200x200米的范围,如果栅格分辨率是5cm,每个栅格占用一个字节内存,那么每个粒子携带的地图都要16M的内存,如果是100粒子就是1.6G内存。
SLAM问题分解
FastSLAM算法独辟蹊径,采用RBPF方法,将SLAM算法分解成两个问题。一个是机器人定位问题,另一个是已知机器人位姿进行地图构建的问题。

其中p(x1:t | u1:t, z1:t)表示估计机器人的轨迹,p(m|x1:t, z1:t) 表示在已知机器人轨迹和传感器观测数据情况下,进行地图构建的闭式计算。
机器人轨迹增量估计分解
FastSLAM算法采用粒子滤波来估计机器人的位姿,并且为每一个粒子构建一个地图。所以,每一个粒子都包含了机器人的轨迹和对应的环境地图。 现在我们着重研究一下 p(x1:t | u1:t, z1:t) 估计机器人的轨迹 。 通过使用贝叶斯准则对 p(x1:t | u1:t, z1:t) 进行公式推导如式
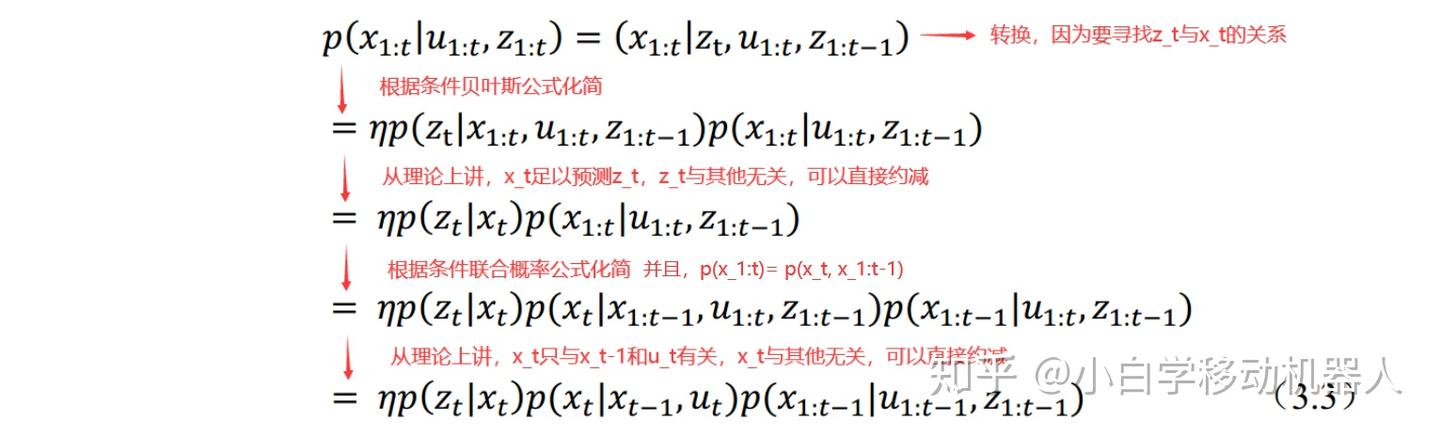
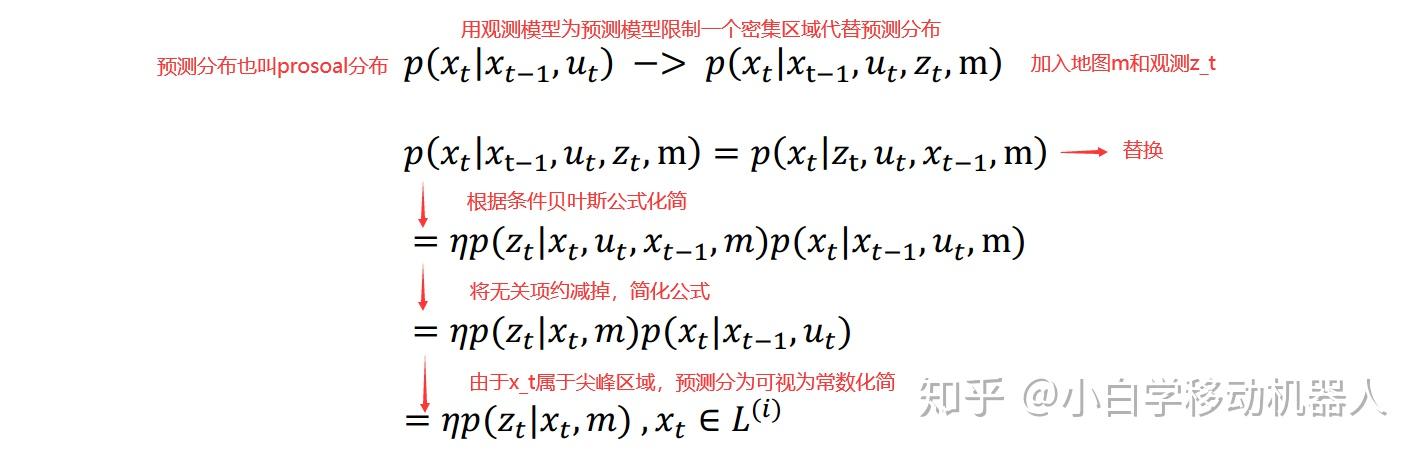
经过上面的公式推导,这里将机器人轨迹估计转化成一个增量估计的问题,用p(x1:t-1 | u1:t-1, z1:t-1) 表示上一时刻的机器人轨迹,用上一时刻的粒子群表示。每一个粒子都用运动学模型p(xt | xt-1, ut)进行状态传播,这样就得到每个粒子对应的预测轨迹 。对于每一个传播之后的粒子,用观测模型p(zt | xt)进行权重计算归一化处理,这样就得到该时刻的机器人轨迹。之后根据估计的轨迹以及观测数据进行地图构建。